
电学层析成像系统
(Electrical Tomography, ET)

ET技术构成
电学成像技术通过对被测物体施加电激励,并检测其边界电学测量值变化,重构物体内部电学参数(电导率、介电常数、磁导率)的分布情况。在工业和医学领域均有重要的应用价值。具有安全无辐射、非侵入、响应速度快、测量方式灵活、价格低廉等优点。
电学成像技术主要包括电容层析成像(Electrical Capacitance Tomography, ECT),电阻层析成像(Electrical Resistance Tomography, ERT), 电阻抗层析成像(Electrical Impedance Tomography, EIT)以及电磁层析成像(Electromagnetic Tomography, EMT)。
电阻抗成像技术(Electrical Impedance Tomography, EIT)
基本原理:通过在被测物体边界施加电激励(电压/电流),检测其边界值(电流/电压)变化,重构被测物体内部电特性参数(电导率/介电常数/复导纳),从而得到被测物内部分布情况。

TJPU_EIT二维EIT成像系统

TJPU_EIT三维EIT成像系统
系统性能:
检测方式:非侵入测量
成像速度:15帧~120帧/秒
空间分辨率:5%~8%
系统信噪比:60dB
EIT应用案例:
石油管路流动状态及油水含量检测
气力输送系统煤粉流量控制
流化床物质混合、反应状态监控
小尺寸管内油膜厚度在线测量
电磁无损检测技术(Electromagnetic Tomography, EMT)
基本原理:基于电磁感应原理的无损检测技术,通过电导率、磁导率测量,获得被测对象表面或内部缺陷的形状、位置。
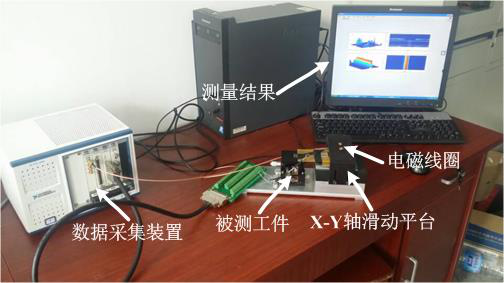
TJPU-EMT系统用于金属零件缺陷检测
零件缺陷检测结果
系统性能:
检测方式:非接触测量
系统信噪比:60dB
检测速度:20帧/秒
检测精度:1%
分辨率:100um
EMT无损检测应用案例:
铁轨裂纹检测
金属零部件缺陷检测
钢材含碳量检测
碳纤维零件检测
金属板厚度测量
钢水凝固过程监控
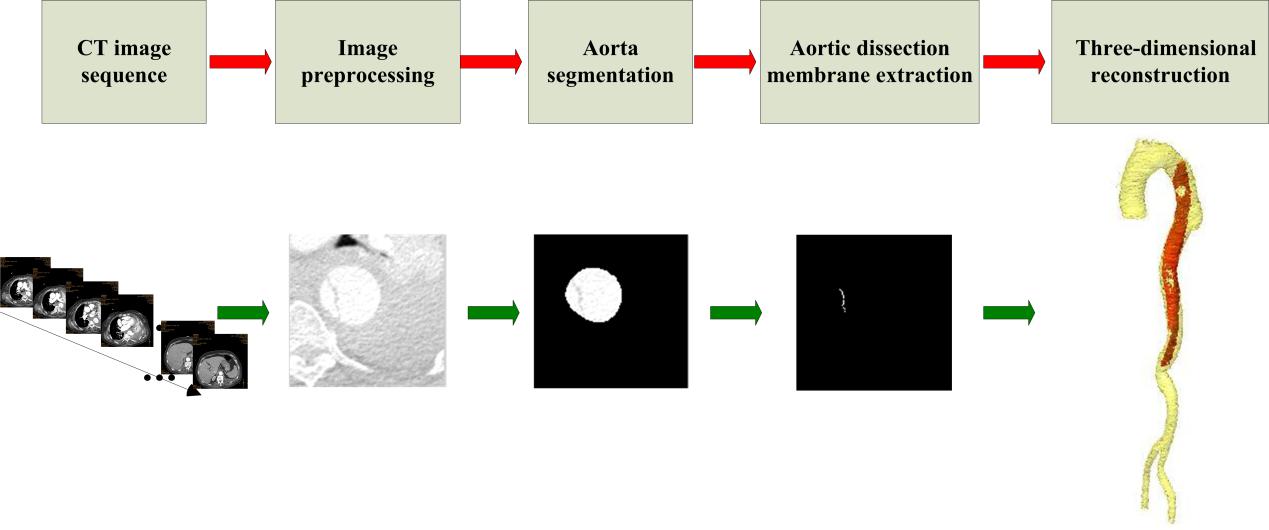
主动脉夹层CT图像三维重建方法
(Aortic dissection CT image three-dimensional reconstruction method)
基本原理:研究基于CT图像的人体主动脉夹层动态三维重构方法,探索可用于腔内隔绝术前的人体胸腹腔主动脉夹层三维结构显示理论和方法:通过连续采集一组人体主动脉夹层胸腹腔的CT图像,通过感兴趣区域算法提取每一幅 CT 图像中主动脉部分,通过基于GVF snake模型提取主动脉边缘,并通过空间连续性先验模型和贝叶斯理论实现对主动脉腔内夹层膜的准确分割,最终完成病人主动脉夹层的3D重建,然后通过CT局部重复扫描,恢复出血流对主动脉夹层中破口位置的动态挤压过程。通过项目的实施,开发一套医学图像处理系统以快速准确地提取主动脉夹层特征并将其三维重建供医生进行临床诊断,对提高手术的成功率和挽救病人生命具有重大意义。
系统功能:
主动脉腔体及夹层三维显示;
内膜破口位置、大小等参数测量;
恢复出血流对主动脉夹层中破口位置的动态挤压过程;
技术拓展:
图像分割技术
三维重建技术
血液动力学技术
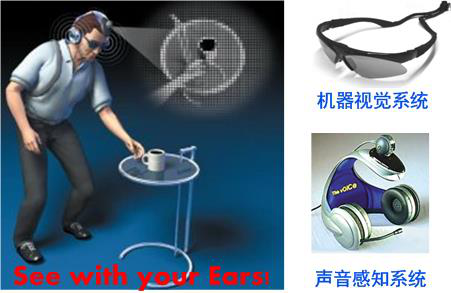
基于视觉~听觉转换的视觉辅助技术
(Vision Aid Technologies Based On Visual-to-auditory Transfer)
基本原理:利用视障者听觉和触觉器官较敏感的特点,将三维空间信息转化为听觉或触觉信息,使视障者有效感知外界环境,解决安全出行以及日常生活问题。

基于视觉~听觉转换的视觉辅助系统
系统功能:
三维图像-声音转换;
辅助导航与路径规划;
危险、障碍预警;
技术拓展:
基于机器视觉的测量与控制技术
脑机接口技术
虚拟现实技术
室内移动机器人视觉导航方法
(The Visual Navigation Methods for the Indoor MobileRobot)
基本原理:图像采集设备安装于天花板以实时获取室内环境的俯视图像,并将图像数据传输给计算机,计算机根据接收到的图像进行处理和计算,以获取或更新当前室内环境的全局导航地图,同时从俯视图像中获得机器人在全局地图中的位置,利用路径规划算法规划出机器人的移动路径,最后计算机机将控制机器人运动的指令无线传输给移动机器人,控制其沿规划路径行走,以实现视觉导航整个过程。
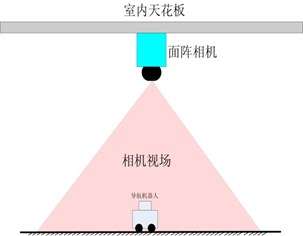

系统原理 系统实验平台
关键技术及性能指标:
全局导航地图创建;
障碍物快速识别;
机器人位置定位;
室内照明条件变化下系统鲁棒性;
在机器人移动速度不大于0.1m/S的条件下提供安全导航。
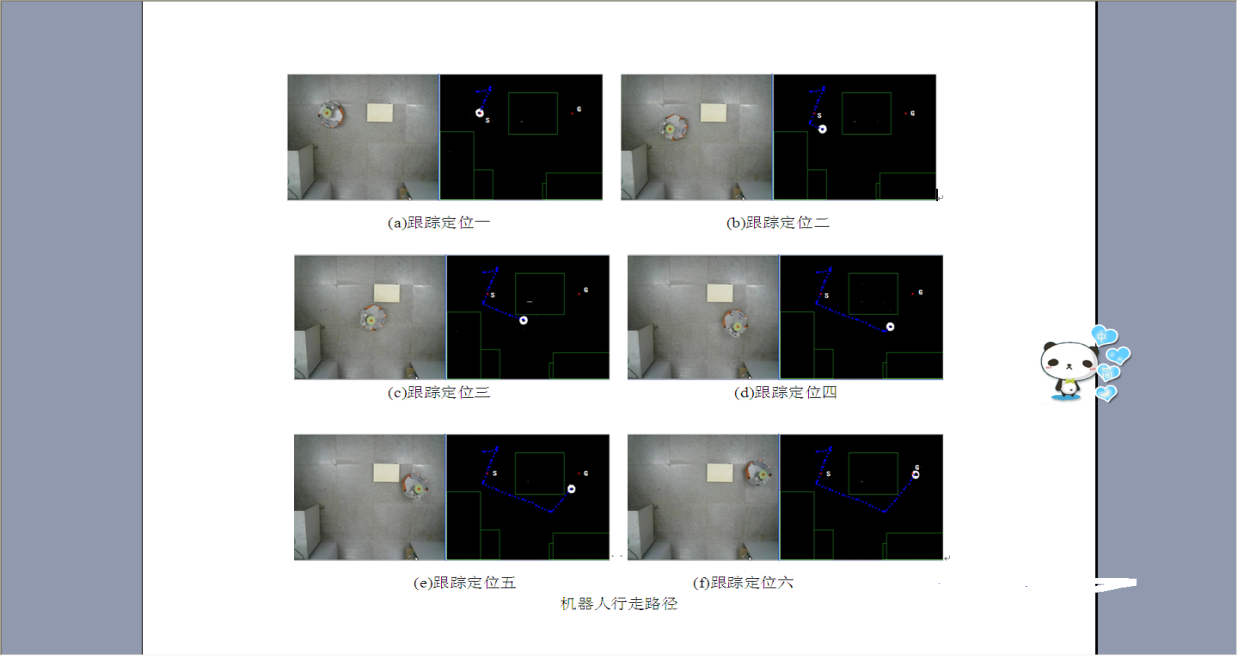
实验结果图
预期效益:
促进室内服务机器人技术实用化;
为设计新型室内服务机器人提供更多导航方案选择。
高端电动汽车用电动助力转向控制器技术
(Electric Power Steering (EPS) Control System for the Electric Car )
基本原理:转向传感器将方向盘的转向力矩信号送入主控制器中,同时控制器采集汽车的车速信号以及发动机转速信号,以判断助力时机,并依据助力特性曲线计算出所需的助力力矩,按照最优控制策略控制助力电机输出转矩完成转向助力;该技术具有降低燃油消耗、实现“按需供能”、转向力可变、增强转向跟随性、改善转向回正特性、提高操纵稳定性等优点。
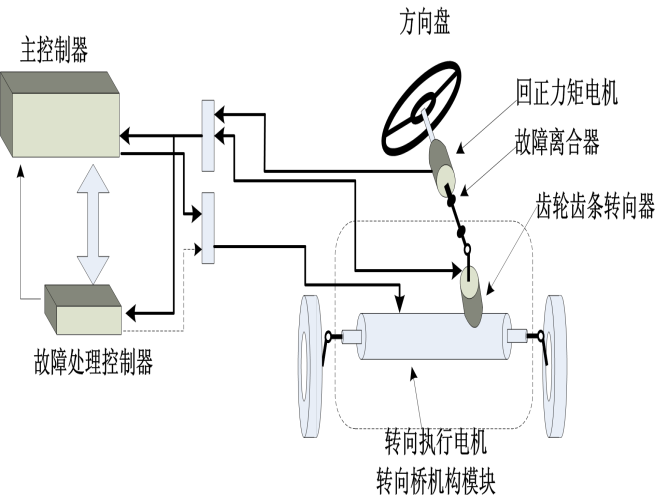
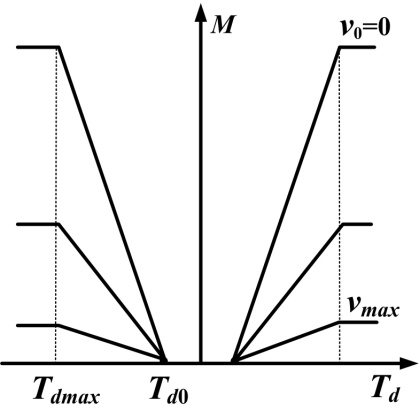
系统测量原理
主要性能指标:
助力曲线光滑等级为优;
输入-输出力矩曲线对称度95%;
回正偏差小于100;
最大工作电流40A。

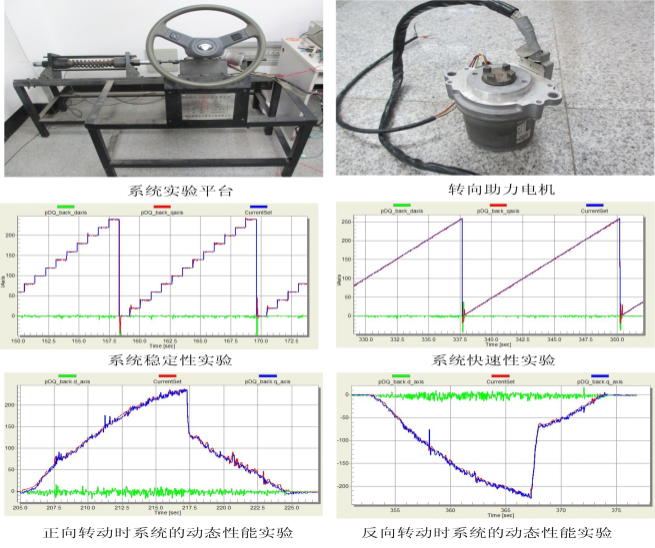
测量系统实验平台及实验结果图
预期效益:
该项成果可降低高端电动汽车用EPS产品对国外技术的依赖程度,提高电动汽车技术的国有化水平,拓展电气传动技术的应用、推动机械、传感器技术、电子器件制造业发展,同时为提供未来电动汽车、智能汽车自动驾驶技术支持。

成果应用
电动助力转向控制器(ECU)性能测试系统
(The Testing System of Electric Power Steering Controller’s Performance)
基本原理:利用PCI板卡产生ECU控制信号,包括点火信号、同步信号、车速、发动机转速、主辅扭矩等,使ECU完成自输入扭矩中位至最大值的工作过程。同时,通过霍尔电流传感器将助力电机电流转换为电压信号输出,采集助力电机电压信号,用以评价ECU性能的对称性等参数性能。
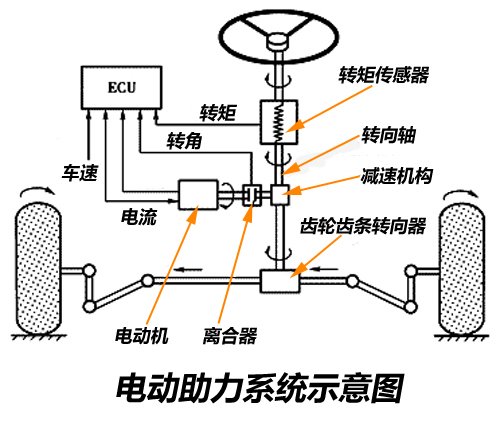
EPS基本组成
系统性能:
扭矩精度0.05V
5V与3.3V系统同时工作的可能
多电机协同控制
助力曲线
优势特点:
测试过程自动完成
测试结果自动记录
适用于多种EPS控制器的测试
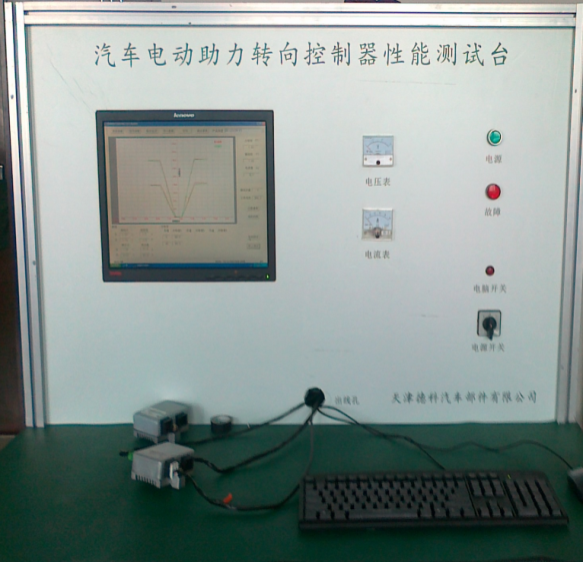
测试台实物
EPS总成钢销高精度测量
(The High Precision Measurement of EPS Assembly Steel Pin)
基本原理:视觉测量系统由工业相机、镜头以及相应系统的光源组成。钢销是EPS总成的关键组成部分,其精度关系到转向系统的用户体验的舒适性和安全性。采用平行光源与双远新镜头搭建系统环境,减少环境对视觉测量系统的影响。
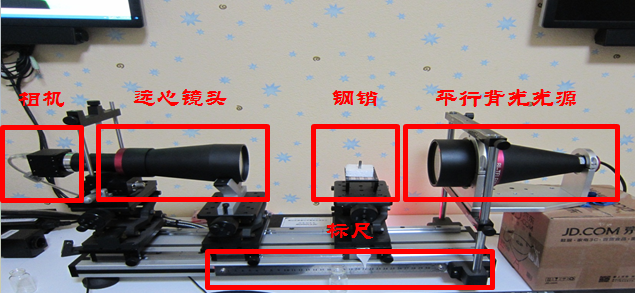
视觉测量系统基本构建
系统参数:
成像大小:2.7×50px
系统精度:0.015px
采集时间:2.3帧/秒
光源:绿色背光光源

系统采集图像
系统优势:
非接触式测量,不会引入形变误差
高精度测量
测试过程自动完成
生产管控与追溯系统设计
(Production Control and Traceability System Design)
基本原理:生产管理与追溯系统是企业生产效率管控与产品品质的保障。生产现场端由数据监控、数据库操作以及人机交互设定等模块组成,通过无线通信模式,将不同子节点相连接。监控程序收集数据进入服务器,管理者通过浏览器输入IP地址访问数据服务器,达到管理生产与产品追溯的目的。
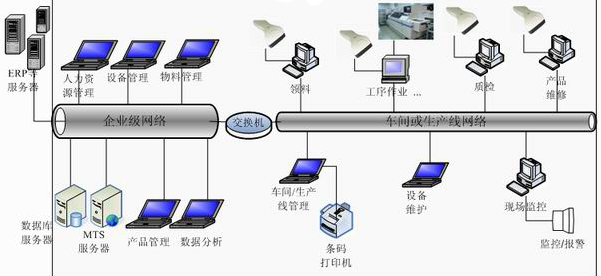
系统特点:
C/S与B/S相结合
采用无线组网,合理利用空间
采用树形结构,减少数据拥堵的可能
串入分组交换机,保留扩展的可能
系统优势:
产品与条形码对应,产品可追溯
个性化适用于企业的生产管理系统
B/S模式,不局限于设备平台的管理方式
光纤干涉条纹投影三维形貌测量技术
(3D ProfilometryBased on Fiber Optic Interference FringesProjection)
基本原理:利用激光器输出激光光束至单模光纤内,经3dB光纤耦合器分光后进入两光纤干涉臂中,构成马赫-泽德干涉仪;在光纤输出端面利用杨氏双孔干涉实现条纹结构光投影,由相机拍摄受被测物调制后变形条纹图像并输入计算机,通过图形处理算法求得被测物体表面3D形貌信息,最终实现对物体表面的三维形貌快速测量。
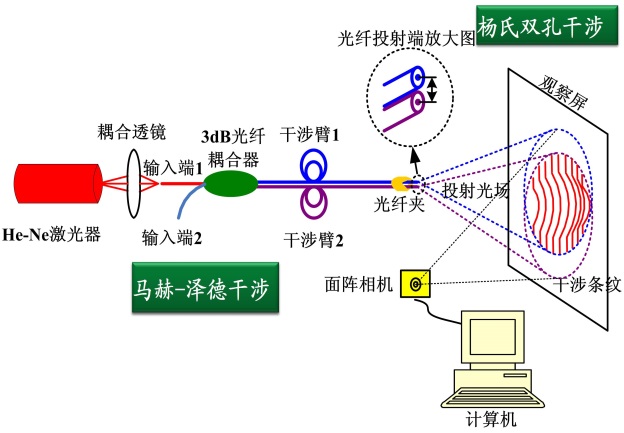

系统测量原理 测量系统实验平台
系统性能:
测量范围:50mm×50mm×30mm;
测量精度:优于±10μm;
动态测量时图像采样频率:≥10Hz;
物体表面测量点数:1024×1024;
应用案例:
小尺寸产品外形高精度测量;
产品表面三维缺陷测量;
三维动态形变测量;
反向工程;
生物医学建模。
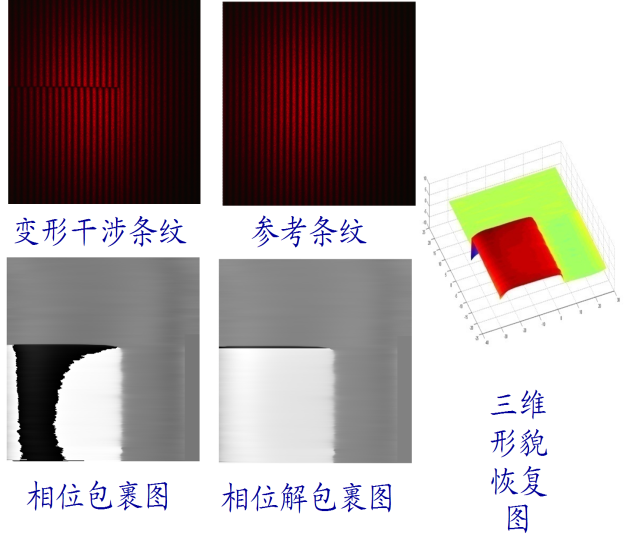
实验结果图
承担的研究项目
[1] 天津市数控一代机械产品创新应用示范工程,2013/01~2016/06,国家科技支撑计划课题重点项目
[2] 用于视障者视觉辅助的物体3D空间信息视觉~听觉转换理论,2014/01~2017/12,国家自然科学基金面上项目
[3] 基于压缩感知的肺损伤三维动态阻抗重建理论研究,2014/01~2017/12,国家自然科学基金青年基金项目
[4] 基于结构光投影的视障者3D视觉信息辅助方法研究,2014/9~2017/12国家自然科学基金青年项目
[5] 基于涡流场相轨迹的碳纤维多层立体编织在线质量评估方法,2016/9~2019/12国家自然科学基金青年项目
[6] 高端电动汽车用电动助力转向控制器关键技术及其研制,2012/4~2015/3,天津市科技支撑计划重点项目
[7] 室内移动机器人视觉导航新方法研究,2011/01~2014/03,天津市应用技术及前沿技术研究计划项目
[8] 面向肺损伤监测的三维动态阻抗图像重建理论研究,2015/03~2017/02,天津市应用技术及前沿技术研究计划青年项目
[9] 基于单目视频监控的室内物体三维信息提取方法研究,2013/1~2015/12,天津市高等学校科技发展基金计划重点项目
[10] 基于机器学习理论的三维声像重建关键技术研究,2011/10~2014/12,天津市高等学校科技发展基金计划项目
[11] 电动汽车线控转向控制器关键技术研究,2013/6~2016/12,天津市高等学校科技发展基金计划项目
[12] 基于脉冲涡流的三维编织碳纤维复合材料缺陷识别方法,2014/01~2016/12,高等学校博士学科点专项科研基金联合资助课题
[13]基于力学分析的三维编织碳纤维复合材料几何建模研究,2013/09~2016/9,天津市高等学校科技发展基金计划项目
科研获奖
[1]基于BCCSL和SFMS的光学三维成像与检测系统,天津市科技进步三等奖,2012.02
[2]单目高精度大型物体彩色三维数字化测量研究及产业化,天津市科技进步三等奖,2014.1
研究成果——发明专利
[1]一种室内视觉导航用障碍物高度检测方法(授权发明专利).专利号:ZL201110105389.2
[2]高精度ECT智能传感器(授权发明专利).专利号: ZL201010261469.2
[3]一种旋转变压器角度信号解码方法(授权发明专利).专利号:ZL201010197231.8
[4]一种基于高斯函数的光纤干涉条纹图像背景光补偿方法(授权发明专利).专利号:201410152884.2
[5]一种改进的IFFT图声转换方法(发明专利).专利申请号:ZL2014110152884.2
[6]一种圆柱型物体直径尺寸的高精度视觉测量方法(发明专利).专利申请号:ZL2014107519635.2
[7] 一种基于数字投影的产品表面质量在线检测方法(发明专利).专利申请号:201610334141.6
[8]一种基于数字投影的产品表面质量在线检测方法(发明专利).专利申请号:201610334141.6
[9]基于GVF Snake模型的人体胸腹腔CT图像主动脉分割方法(发明专利).专利申请号:201610334143.5
[10]基于Hessian矩阵的的人体胸腹腔CT图像主动脉夹层提取方法(发明专利).专利申请号:201610334142.0


Copyright © 2015 天津工业大学·电子与信息工程学院 版权所有